
I did a few very simple experiments with cable controls. I am not the best crafter, so I wanted to be very systematic about how to make my cable controls function.
The basic form of my cable control was a set of straws, punctuated with small diamond shape holes with a string anchored at the top of the and pulled through to the bottom (where I could pull it).
For this assignment, I varied whole size and distance between holes to see how it impacted behavior.
The setup is below:
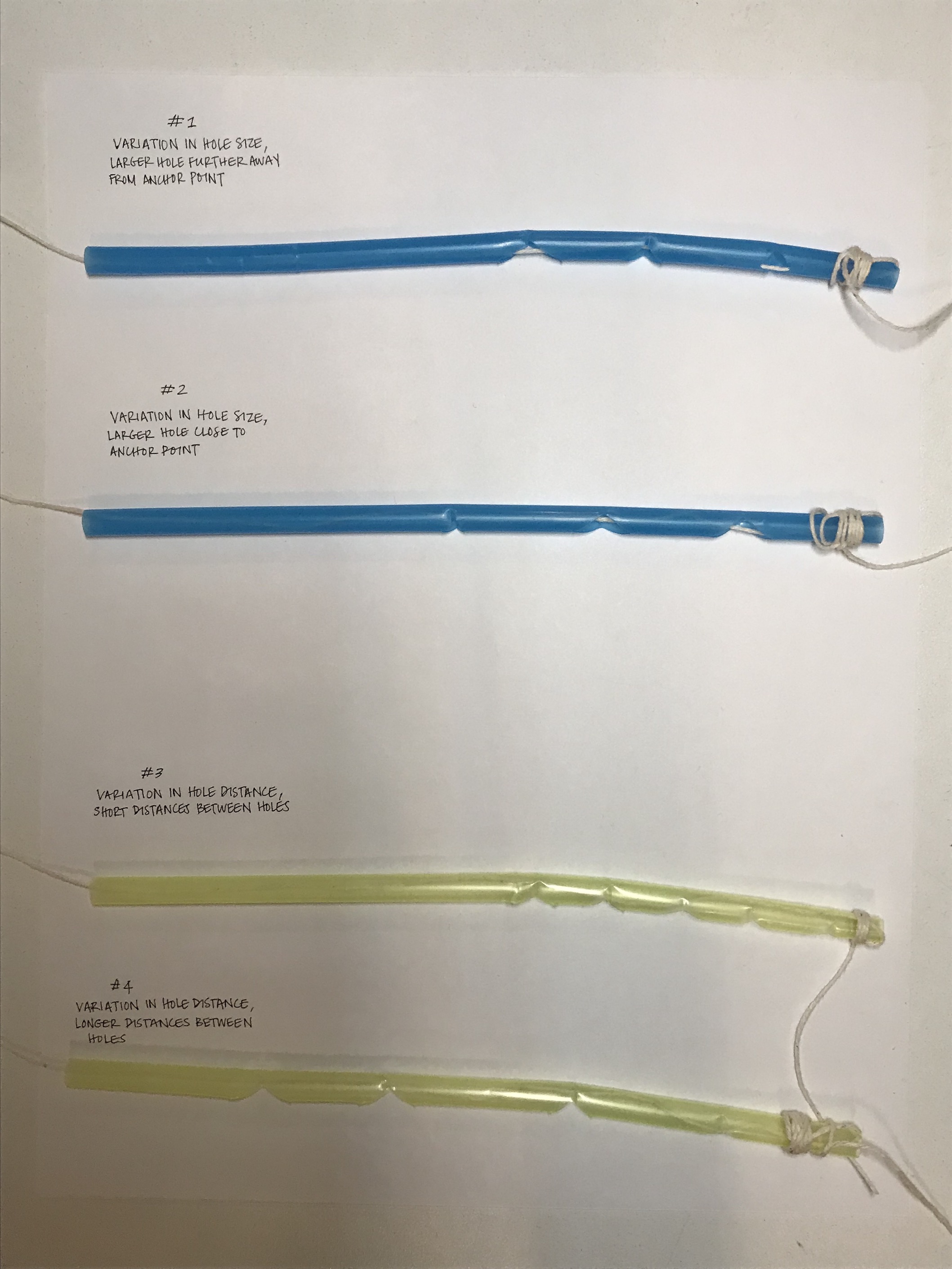
You can see how the variables affected their movement here:
My favorite was #2, which had the largest hole at the top of the straw (in contrast to #1, which had the largest hole towards the bottom). The larger holes essentially folded first, making the motion that resulted more of a curl.